 手机版|
手机版|

 二维码|
二维码| 
![]()










- 产品详情
- 联系方式
- 产品评价
- 供货总量:
- 发货期限:自买家付款之日起 3 天内发货
- 所在地:上海
VTD-自动驾驶仿真专家
VTD是世界上使用广泛的开放平台,用于创建、配置和动画化仿真环境以及用于ADAS和自动驾驶汽车的培训、测试和验证的场景。它提供了用于道路网络创建、场景定义、车辆动力学、交通 和声音模拟、模拟控制、图像生成、传感器感知等的模块化工具集,创建复杂驾驶场景的数字现实。可以用于MiL、软件在环(SiL)、硬件在环 (HiL ) 、驾驶员在环(DiL ) 和车辆在环(ViL ) 的交通场景模拟。VTD的最新研究进展能够在云端 进行大规模的方案“边缘情况”的检测。这是通过使用数以千计的并行流程分析数百万种方案来完 成的,比实时仿真更快地完成数十亿次虚拟测试,提高了ADAS和AD系统的速度。
VTD可以使用开放的标准(OpenDRIVE 、OpenCRG和OpenSCENARIO ):
• OpenDRIVE是全球领先的开放格式,也是驾驶模拟应用中道路网络描述的实际标准。
• OpenCRG是用于创建、管理和评估详细路面的领先的开源数据格式和工具套件。
• OpenSCENARIO是先进的用于定义模拟道路网络中动态行为的开放格式。
VTD的Road Designer (ROD)是一种交互式的路网建模器,可以用作3D世界创建的基础。它由代 表不同国家3D对象和纹理的大量资源库组成,可以创建完整的数据库和基本构造块(所谓的“平 铺”)。
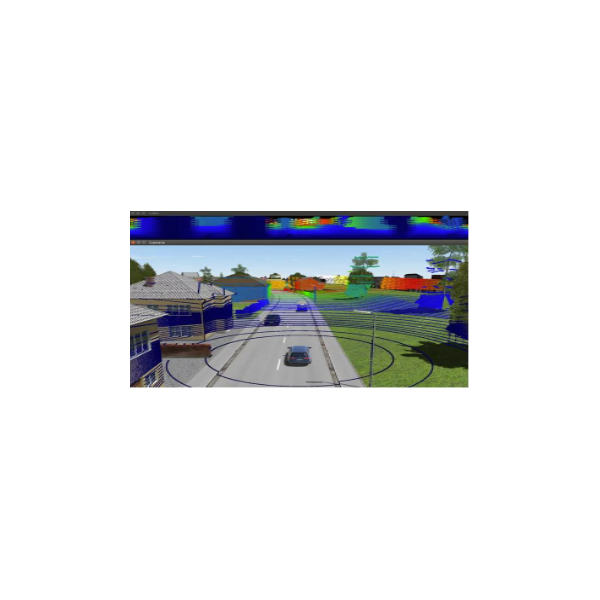
海克斯康MSC VTD是一个用于创建、配置和动画化虚拟环境的开放平台,用于测试和验证自动驾驶汽车。它作为上面提到的集成解决方案的开放平台,能够接收车辆的位置和运动信息,实时重建3D环境(包括交通情况和行人), 计算传感器的感知和周围车辆的运动等等。该数据流可用于训练AI驾驶员(环境感知,传感器融合,目标识别,路径规划),并对安全性、舒适性和效率进行评估。
车辆CAE模型:根据仿真需要处理的情况,使用具有不同复杂程度的车辆模型会使处理有所简化。
传感器和传感器模型: VTD具有一整套面向虚拟场景的传感器仿真解决方案, 可以基于真实自动驾驶车辆配置的物理传感器完成传感器模型,涵盖的传感器类别包括:摄像机(包括红外), LiDAR,RADAR 和超声传感器。
3D驾驶环境:3D虚拟环境可以从VTD内部创建生成,也可以通过扫 描实际道路生成。
方案和数据管理:在自动驾驶汽车开发的每个步骤都要评估数百万种方案的情况下,手动管理资源是非常困难的事情。
人工智能 (AI)驾驶员: AI驾驶员是每个自动驾驶系统的核心,用户可以方便地将VTD连接到自己的AI驾驶员,以此来在各种情况下进行仔细的验证,包括传感器故障或者不正常情况, 例如飞溅的泥浆覆盖了雷达的一部分。











-
乐总


